News Release from windfair.net
Wind Industry Profile of
Windfair introduces new colleague for maintenance of offshore foundations
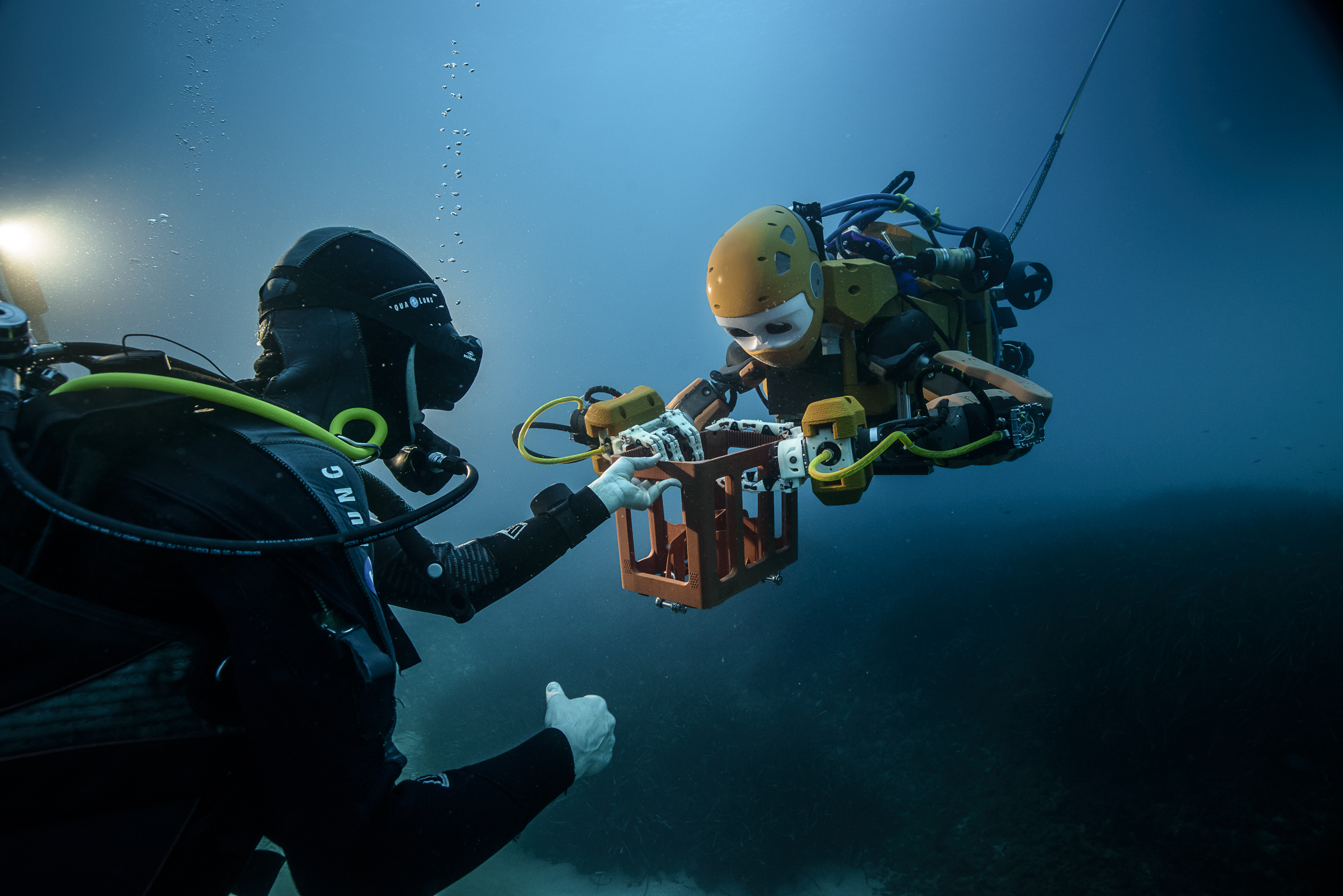
What still sounds a bit like science fiction, actually has become reality off the French Mediterranean coast recently. There, OceanOne took its first dive a few days ago. Developed by the American university of Stanford a diving robot visited the wreck of the French ship ‘La Lune’ which sank in 1664 off the southern coast of France.
In a depth of nearly 100 meters, the robot moved through the wreckage and recovered parts of the load for archaeological investigations. OceanOne was controlled by Oussama Khatib who operated the robot using a joystick from a research boat. Mini-submarines and diving robots have long been standard in underwater research, however, OceanOne provides a whole new way of diving robots.
Its exterior resembles a human body: Cameras are sitting in a movable head and the two gripping arms with hands are modeled like human extremities. Artificial intelligence, human vision and haptic feedback systems provide the human pilot with an unprecedented opportunity to explore the depths of the ocean.
The expedition to La Lune was OceanOnes maiden voyage. Based on this success, Khatib hopes that in the future the robot can master highly complex tasks under water that are too dangerous for human divers. “OceanOne will be our avatar,” Khatib said. “The intent here is to have human diving virtually with putting the human out of harm’s way. Having a machine with human characteristics that can project the human diver’s embodiment at depth is going to be amazing.“
The idea for OceanOne was born from the need to study coral reefs in the Red Sea which were far below the feasible range of human divers. But no existing robotic submarine could keep up with the same skill and care of a human diver. OceanOne therefore looks a bit like a robo-mermaid. It measures about five feet from head to ‘tail’, in which batteries, computers and eight engines are located. However, the special thing is the ‘hands’ that send haptic feedback to the pilot so that humans can sense whether the robot is holding something solid, heavy or light. The ‘brain’ of the artificial intelligence reads this data and ensures that his hands do not damage the objects by pressing too hard. “You can feel exactly what the robot is doing,” Khatib said. “It’s almost like you were there. With the sense of touch you create a new dimension of perception.”

Sensors on the body of the robot also ensure that it can almost move by itself through the water. Flows, turbulences and collisions are intercepted and corrected, so the pilot has barely anything to do above the water. If the robot performs together with human divers a communication by known hand gestures is possible, so that the boundaries between men and machine blurs.
Ultimately, OceanOne should however ensure that the need to expose human divers to certain dangers is no longer an option. The main applications for the robo-mermaid are therefore varied: underwater mining, disaster situations like Fukushima or the maintenance of oil platforms are possible. Since it is quite obvious, you can put another pioneering technology onto that list: the maintenance of offshore wind turbines.
"We connect the human to the robot in very intuitive and meaningful way. The human can provide intuition and expertise and cognitive abilities to the robot,” Khatib said. “The two bring together an amazing synergy. The human and robot can do things in areas too dangerous for a human, while the human is still there.”
So far, OceanOne is still a prototype. As of this month, it will be back to a lab in California to be further refined. In a next step, additional copies are to be built, to see how several models work together. And who knows, maybe you will soon find colleagues of OceanOne in the North Sea to do the maintenance work for offshore wind farms.
- Author:
- Katrin Radtke
- Email:
- kr@windmesse.de